

3200F円柱Supercapacitorのための自動液体の注入機械
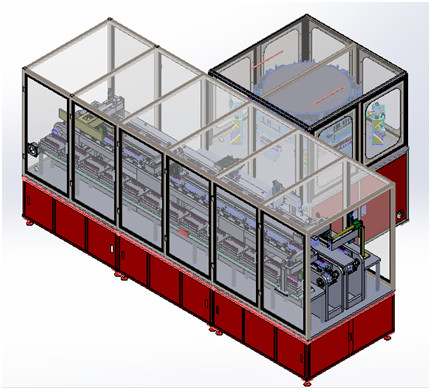
装置の紹介
装置は円形アルミニウム貝のsupercapacitorの手送り箱のために適している、装置は自動的にsupercapacitorをつかみ、自動的にバー コードを掃除し、自動的に重量を量り、自動的に液体の注入の穴を見つけ、与えるために自動的に版を回し自動的に液体、自動的に残りへの真空を満たし、自動的に2回目に重量を量り、そして自動的に材料を切る。
2. 技術的な変数:
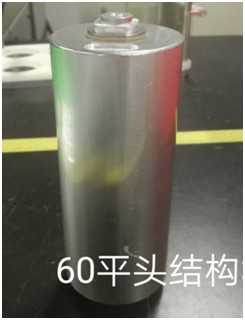
2.1. supercapacitorのサイズ:
| Supercapacitorモデル | 直径(mm) | H (mm) | H1 (棒のコラム) (mm) | M (棒の糸(mm) |
| 60162 | 60 | 162 |
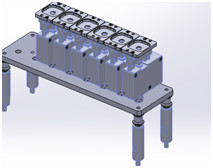
次に真空および圧力互い違いの静的なモードの後の2.1の真空の見本抽出および液体の注入、一度だけの液体の注入、液体の注入、よい吸収の一貫性、よい均等性、高性能、高精度、容易なおよび信頼できる操作;液体の注入の皿および8つの場所の回転式テーブルの6 ultracapacitorsは48 ultracapacitorsに掃除機をかけ、加圧できる。永続的な時間は置くことができる。
2.2液体の注入プロセス:
手動供給箱の→のマニピュレーターは電子スケールの据え付け品に小さい皿の→のsupercapacitorに自動的に液体の注入の→のマニピュレーターが液体の注入の皿の→のサーボ モーターにsupercapacitorを回すsupercapacitorを切る前に6 supercapacitorsを自動的に回るバー コードの→を掃除するために入れたsupercapacitorの重量を量るためにそれらをつかむ。自動的に液体の注入港を検出すれば訂正流動注入港の位置-車輪への自動的にクリップ マニピュレーターの小さい皿重量を量ることの後で-は極度のコンデンサーの注入口への自動注入ポンプ-真空国家への自動ポンプ空気、立場の吸収(液体の注入の場所)を許可しなさい- > 8回後のノートの液体の皿立場を自動的に取除く極度のコンデンサーを(不適当なsupercapacitorの人工的な再水和作用) - >帰り液体の皿が自動的に次の周期の重みづけのための最も高い位置であるノート、液体の注入、真空許可した再度重量を量る立場を立場のマニピュレーターを可能にするために自動的に放った。
2.3の特徴:
自動的に加圧し、掃除機をかけるべき2.3.1の使用別のsupercapacitor。
2.3.2閉鎖した真空ポンプおよび与圧は保護するsupercapacitorの電解物が防ぐために、第2液体の注入の回数を減らすために採用され腐食から真空ポンプをたくさんポンプでくまれることを。
2.3.3は真空タンク独特なクールな構造の設計を採用する。真空タンクを通して冷却される電気分解の液体はタンクの底で真空ポンプを保護するために凝縮する。
2.3. 自動重量を量り、引きベルト システム:supercapacitorのベルト、自動に重量を量ること、コンピュータのおよびデータ処理引っ張る、自動ブラケットの流れデータベース、NG警報および他の機能重量を量る。
3. 基本的な変数:
|
機械指定 プロジェクト |
ZDAE07C |
| 効率の | 12PPM (効率は真空のポンプ時間に従って2分に計算される) |
| 精密注入の液体 | +/- 2 gの中では |
| 割り当てられた立場の時間が | 2minに従って計算される。 |
| 収穫 | 1つの注入の修飾された率は98%の>であり、不適当なsupercapacitorは手動replenisherを採用する。 |
| 液体の注入率 | 180 | 300 gは調節可能である |
| 力 | 5KW |
| 電子スケールの精密 | 範囲:5Kgの正確さ±0.1g。 |
| 設備故障率 | 5%またはより少なく |
| シーリング | 液体の注入の場所は密封された州にあり、真空は2minのために維持することができる-95kpaにポンプでくまれる、) |
| 全面的なサイズ(mm) | 4500*3000*1800 |
3.2.1. 手動で供給の空室にultracapacitorsの全箱を入れなさい。
3.2.2. マニピュレーターは物質的な箱からのsupercapacitorを取り、バー コードを掃除し、そして計量局に入れる;
3.2.3. 電子に重量を量ることは、装置自動的にバー コードをデータ コンピュータに重量を量る読み、;
3.2.4. マニピュレーターは自動的に重量を量るsupercapacitorを取除き、副皿に入れる。1つの副皿に6 supercapacitorsがある。
3.2.5. シリンダーはultracapacitorを押すためにultracapacitor、活動的なドライブ車輪を押すように受動の車輪を運転するサーボ モーターはultracapacitorを回し、光ファイバーは液体の注入港および停止を検出する。6つを次々と検出した後、マニピュレーターは自動的に副皿をつかみ、母皿に入れる。
3.2.5. 回転式自動給弾装置は自動的に小さい皿に与え、同時に自動的に液体で満ちている小さい皿のsupercapacitorを荷を下すことができる。
3.2.6. 自動液体の注入機械仕事は動くために、サーボ モーター液体の注入のノズルを運転し6 supercapacitorsは引き続いて注入される。
3.2.7. ポンプに掃除機をかけなさい:時間はタッチ画面によって置かれる。
3.2.8. 自動液体の注入:3つの二重ヘッドの液体の注入ポンプ。
3.2.9. 立つこと:圧力と低い真空の間で交互にしなさい。
3.2.10. 自動downforce:注入のノズルからsupercapacitorを分ける助け。
3.2.11. 新しい空ブラケットに置かれるブラケットを取除き項目7に11.の操作の流れを繰り返しなさい。液体に満ちたsupercapacitorブラケットは進む;
3.2.12. 再度重量を量りなさい。ultracapacitorブラケットは重さを測り直す場所にベルトAを引っ張った後動く、コード読者はブラケットのバー コードを読み、マニピュレーターは重量を量るセンサーに6 ultracapacitorsを次々と動かし、重量を量り、そしてバー コードをおよびデータ コンピュータに重量を量る読む。コンピュータは自動的にsupercapacitorに注入される液体の量を計算し、supercapacitorに注入される液体の量が修飾されるかどうかわかる。NGに即時警報があり、NGのsupercapacitorは自動的に除かれる。
3.2.13. ブラケットがBの引きベルトの右端に達するとき、マニピュレーターは元の供給箱に自動的にsupercapacitorをつかむ;物質的な箱に対応する。
3.2.14. 空ブラケットはマニピュレーター1によってベルトAを引っ張るために運ばれブラケットは右から左へ流れる;
3.2.15. ベルトBの左端の端に、マニピュレーターは次の周期のためのAにベルトを付けるためにブラケットを動かす。
注:真空の時間および静的な時間は状態に従って置くことができる。圧力空電か大気空電は選ぶことができる
3.3機器構成
| 順序 | 装置の名前 | 単位 | 数の | ノート |
| 1 | 場所8の自動注入機械 | 台湾 | 1 | |
| 2 | 電気注入ポンプ | 台湾 | 3 | 正確さの+ - 0.5% |
| 3 | 真空管 | 台湾 | 2 | 製造業者は専有物を持って来るべきである |
| 4 | ブラケット、 | a | 24 | |
| 5 | 制御システム | の置きなさい | 1 | |
| 6 | クリーニング システム | の置きなさい | 1 | |
| 7 | 電解物の移動タンク | の置きなさい | 1 | |
| 8 | 洗濯用溶剤タンク | の置きなさい | 1 | |
| 9 | 洗濯用溶剤タンク | の置きなさい | 1 | |
| 10 | ハウジング | の置きなさい | 1 | |
| 11 | ドローストリング システム | の置きなさい | 2 | |
| 12 | システムの重量を量ること | の置きなさい | 4 | |
| 13 | マニプレータ システム | の置きなさい | 6 | |
| 14 | 真空ポンプ | a | 1 | |
| 15 | 自動コード読書および重量を量るシステム | の置きなさい | 1 | |
| 16 | 制御システム | の置きなさい | 1 | Omron PLC |
| 注目: | ||||
3.4. 装置色:色:色カード:gsb05-1426-2001 (GSB g51001-94の代りに)、61 R02朱色、ミラーのペンキ、滑らかな表面点なしでを頼むため、凹面および凸ピット。
4. 場所の環境要求事項
4.1. 周囲温度:党aの工場環境によって定められる;
4.2. 相対湿度:乾いた空気は党aによって提供される;
4.3電源:三相380V、50HZの電圧変動範囲:+ 10%-10%;
4.4. 圧縮空気:乾燥の後で、ろ過され、安定させて、出口の空気圧は5.0kg/cm2より大きい;
4.5. 真空の源:真空ポンプまたはパイプラインの真空、-98kpaより大きい真空の程度;
場所の空気が妨げられていないことを4.6党aは保障する;
1. 新しい装置の約束
私達の会社は顧客に提供される商品が真新しく、完全な未使用装置であることを保証する。
2. 機密性の責任
私達の会社は党の許可書なしで、他の党の関連のデッサン、技術情報、ビジネス情報および他のビジネスの秘密および技術秘密がどうにか第三者に漏ってはならないと約束する。
3. 売り上げ後のサービスの責任
(1)装置の郵送物の日付からの2か月、党Bは1年以内の時機を得た、自由な保証の人間でない欠陥に責任がある(装置が不良なとき、売り上げ後のサービスのスタッフは通告を受け取った後2時間以内に答える。状態に従って、人員は48時間以内になる。後でより60時間無し、生産の継続をバイヤーによって保障するため;
(2)装置が保証期間を渡した後、問題があれば、2党はそれを伝達し合い、取扱う。必要ならば、アフターセールスの人員はそれを修理するために送られ費用だけ満たされる。Zh
(3)保証期間の間に契約で規定し、2党によって署名した技術的な一致は私達のプロダクトの正常な使用の間に人間の損傷によって起こされない質問題に会社保証を提供する。













