
機械を紐で縛る理性的な電池のパック アセンブリ装置の電気細胞
1. 機械を紐で縛る電気細胞の設計の品質:
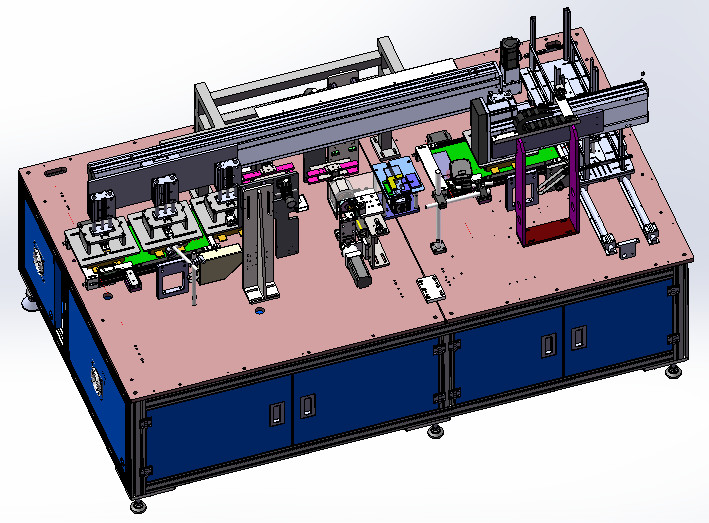
1.1. 装置は機械を紐で縛る電池のプロセス設計の条件に基づき企業4.0の設計に基づく電池理性的な自動紐で縛る機械は製造されたです。生産ラインは下記のものを含んでいます:装填装置、供給のマニピュレーター、場所を積み重ね、置き、位置、噴霧の位置および排出ラインを束ねます
1.3. 使用の状態:
1.3.1の電源の状態:主力供給:220V±15%
1.3.2圧縮空気:≥ 0.5mpa、10L/30分
1.3.3の周囲温度:0℃ | 40℃。
1.3.4相対湿度:10 | 60%RH
1.4. 生産所要:
1.4.1の出現の条件:
1.4.1.1の均一出現、変形無し;
1.4.1.2ピンホール無し、流れの印、または他の欠陥;
1.4.2のサイズの条件:
1.4.2.1. プロダクト幅35-100mm。
1.4.2.2プロダクト長さ:50-150mm
1.4.2.3プロダクト壁厚さ:3.8-12mm
1.4.3電池のバーコード
1.4.3.1. 前部で、レーザーを印刷されたqrコード使用するか、またはバーコードを貼って下さい
1.5. 機械を紐で縛る電池の性能要件:
正常な生産の下で会う条件は調節します;メカニズムを置く装填装置はメカニズム、バインディング メカニズム、マニピュレーターのメカニズム、安定したおよび信頼できる、簡単な操作を掃除します;すべての可動部分は潤滑のメカニズムを作動させること容易適度が、信頼できるある、べきです。
装置の1.5図式的な図表
1.5.1装置の職業サイズ(単位:mm):2300*1300*1500 (長さ*幅*高さ)
2. 機械を紐で縛る電気細胞の主要なコンポーネント:
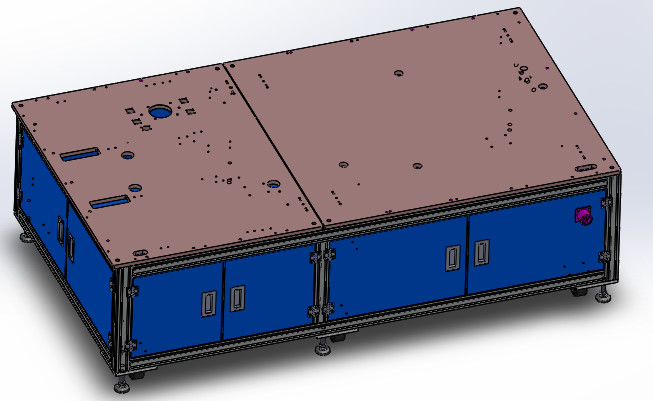
2.1の棚
2.2.1は30X60アルミニウム プロフィールおよびA3薄板金の部品とフレーム システム組み立てられます。
2.2. 皿材料のローディングの場所
2.2.1の設計の品質
2.2.1.1の供給力はシリンダーおよび2箱の供給箱によって運転されます。そこに左右の側面でバッフル、持ち上がるメカニズムを置いています、
1つの側面は光電検出スイッチが装備されています
2.2.1.2のプロセス パラメータ:位置の幅は電池のサイズに従って調節することができます。手動供給レベルは約3つの場所であり、中間マニピュレーターは供給レベルを取ります
2.2.2の本管の機器構成
| 通し番号 | システム構成 | システム構成 | 数の |
| 1 | 移動システム | シリンダー | 1 |
| 滑り易いコース | 2 | ||
| 2 |
位置方式(GPS)
|
記事のポジション・ブロック | 4 |
|
機械で造られた部分
|
1 | ||
| 大箱 | 2 | ||
| 盗品のプラットホーム | 1 | ||
| 3 | 升エレベーター システム | 持ち上がるモーター | 1 |
| 持ち上がるねじセット | 1 |
2.2.3機能:手動で物質的な箱にディスク材料の全体の積み重ねの電池を置いて下さい、材料のシリンダーが中間の場所に検出し、材料を取るために供給のマニピュレーターを待ち移る2箱の供給箱は供給を循環しますことを光電検出スイッチは
2.3電池の供給のマニピュレーター
2.3.2. 装置の主要な部品
2.3.2.1. 電池の供給手:それはサーボモーター、鉛ねじモジュール、近さスイッチ、持ち上がるシリンダー、吸引の版のグループ、等で構成されます。構造は簡単、実用的です。
2.3.2.1 .1:吸盤のグループの動きは正確な位置のためのねじモジュールのサーボ モーターによって制御されます。利用できる近さスイッチ電池。
2.3.2.1 .2:工作物は便利、連続的、安定しています信頼できます。
2.4機能:電池の移動のメカニズムに皿および空の皿のコレクションのメカニズムに空の皿の電池を引いて下さい
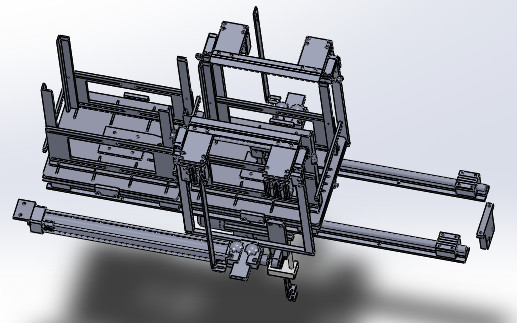
2.4電池の移動のメカニズム
24.1.1. 電池伝達メカニズム:このメカニズムはシリンダー、近さスイッチ、等を置くステップ・モータ、ベルト、ブラケットで主に構成されます。
2.4.2.1力のメカニズム:調節可能な速度。
2.4.2.2. 電池は工具細工の位置による電池への損傷なしで保障されます
工具細工および電池の位置の2.4.2.3の位置は正確さの≤± 0.1mmの位置と容易に、調節することができます
2.4.2.4ベルト ベルトの引張りのメカニズム
2.4.2.5は支承板で、メカニズム主に構成されます基づき、置くピンを置くピンを置くことは安定性および信頼性の簡単な操作を保障します。
2.4.3機能:電池を供給のマニピュレーターから位置に移し、材料を取るために測定の電圧抵抗のマニピュレーターを待って下さい
2.5.1.1. スキャンのメカニズム:このメカニズムはブラケット、スキャン銃、等で主に構成されます。
2.5.2.1ブラケットの高さの角度は任意に調節することができます
2.5.3機能:電池の元のデータを集め、計算機システムに送信するために電池の表面のqrコードをスキャンして下さい。
2.6.1.1はブラケット、持ち上がるシリンダー、光電センサーの調査で装置主に、等妨げます構成されます。
2.6.2.1は電池のサイズに従ってブラケット任意に調節することができます
2.6.3機能:細胞を積み重ね、置いて下さい。
2.7.1.1. 回転メカニズム:このメカニズムはシリンダー、近さスイッチ、等を置くステップ・モータ、ベルト、ブラケットで主に構成されます。
メカニズムを置く2.7.2.1テープ:調節可能な速度、
2.7.2.2. 電池は工具細工の位置による電池への損傷なしで保障されます
2.7.2.3. 工具細工および電池を置くことは正確さの≤± 0.1mmの位置と、便利に調節することができます
2.7.2.4ベルト ベルトの引張りのメカニズム
2.7.2.5は支承板で、メカニズム主に構成されます基づき、置くピンを置くピンを置くことは安定性および信頼性の簡単な操作を保障します。
2.7.3機能:横のマニピュレーターから取られる電気細胞を一緒に録音して下さい
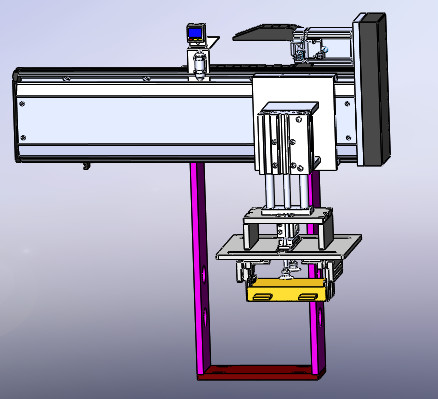
2.8.1.1の供給のマニピュレーター:このメカニズムはブラケット、持ち上がるシリンダー、ねじ棒モジュール、吸引ディスク、微調整棒、等で主に構成されます。
2.8.2.1は電池のサイズに従ってブラケット任意に調節することができます
2.8.3機能:細胞の移動のメカニズムからの紐で縛る位置のジグ アセンブリに電池を持って行って下さい
2.9.1.1. スキャンのメカニズムをコードして下さい:このメカニズムはブラケット、コード銃、等で主に構成されます。
2.9.2.1ブラケットの高さの角度は任意に調節することができます
2.9.3機能:計算機システムのデータ解析セットによって形式区分電池のに従って異なったコードは電池の表面で吹きかかります。
2.10.1.1. 電池伝達メカニズム:このメカニズムはシリンダー、近さスイッチ、等を置くステップ・モータ、ベルト、ブラケットで主に構成されます。
2.10.2.1力のメカニズム:調節可能な速度、
2.10.2.2. 電池への損傷は工具細工の位置によって保証されません
2.10.2.3. 用具および電池を置くことは正確さの≤± 0.1mmの位置と容易に、調節することができます
2.10.2.4ベルト ベルトの引張りのメカニズム
2.10.2.5は支承板で、メカニズム主に構成されます基づき、置くピンを置くピンを置くことは安定性および信頼性の簡単な操作を保障します。
2.10.3機能:横のマニピュレーターから取られる電池はロボットの物質的なレベルに吹きかかり、提供されるコードを待っています
1. 新しい装置の約束
私達の会社は顧客に提供される商品が真新しく、完全な未使用装置であることを保証します。
2. 機密性の責任
私達の会社は党の許可書なしで、他の党の関連デッサン、技術情報、ビジネス情報および他のビジネスの秘密および技術秘密がどうにか第三者に漏ってはならないと約束します。
3. 売り上げ後のサービスの責任
(1)装置の郵送物の日付からの2か月、党Bは1年以内の時機を得た、自由な保証の人間でない欠陥に責任があります(装置が不良なとき、売り上げ後のサービスのスタッフは通告を受け取った後2時間以内に答えます。状態に従って、人員は48時間以内になります。後でより60時間、生産の継続をバイヤーによって保障するため;
(2)装置の後で問題があれば保証期間を、2党伝達し合い、取扱いますそれを渡しました。必要ならば、アフターセールスの人員はそれを修理するために送られ費用だけ満たされます。Zh
(3) 2党によって署名した契約および技術的な一致で規定された保証期間の間に会社は私達のプロダクトの正常な使用の間に人間の損傷によって起こされない質問題に保証を提供します。













