
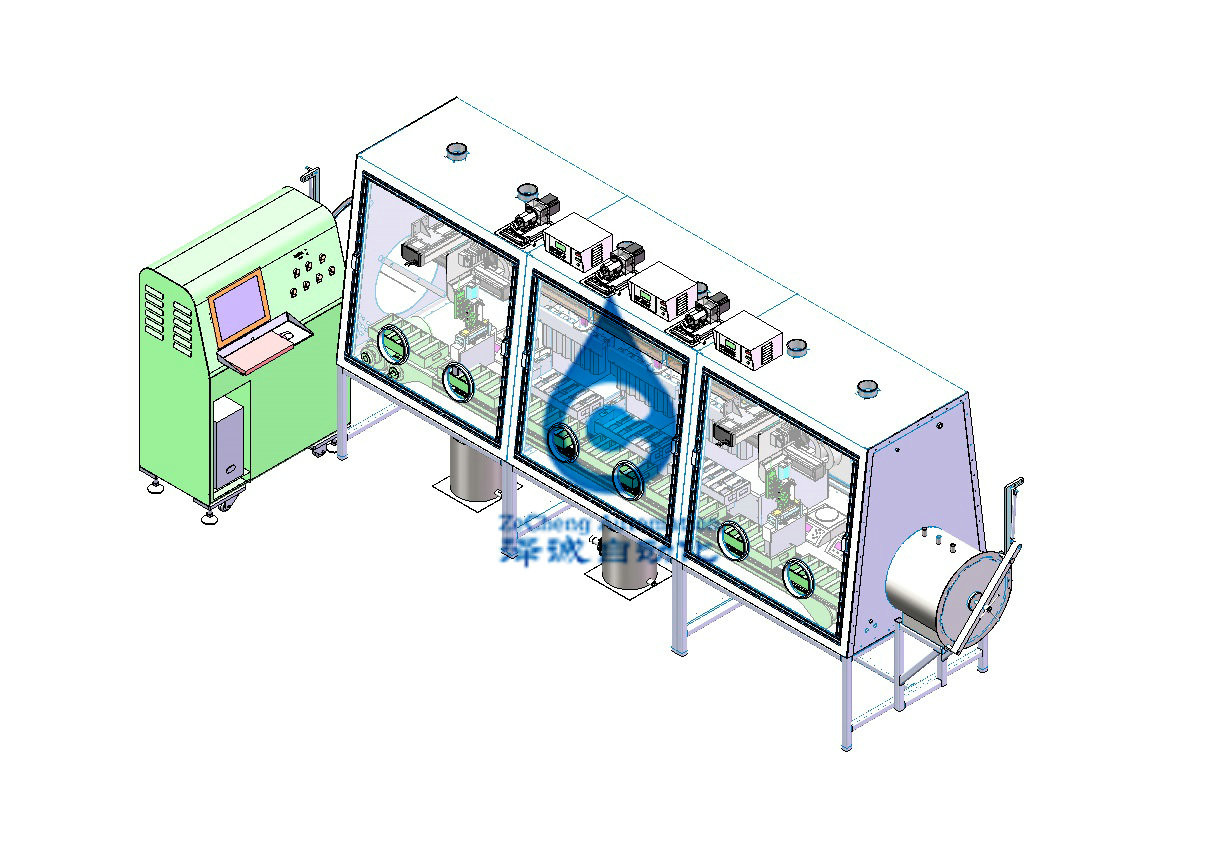
簡潔に1.Liquid注入機械
この装置はグローブ ボックスの鋼鉄電池の貝のために適しているまたは乾燥した注入の液体は、人工的なスキャン コード、自動に重量を量ることの自動注入の液体を、自動真空許可したグローブ ボックスの立場、自動に重量を量ること、自動削除、人工的な再水和作用プロセスまたは電池の自動装置のバッチ生産のための乾燥部屋を実現する。
2. 設計の品質
2.1. 電池のサイズのために適した:240mm長さに、幅の110mmおよび厚さの40mm。
![]()
2.2. サンプルは最初に掃除機をかけられ、次に液体と、そして液体と一度注入した注入され、次に真空および圧力は注入の後に互い違いに置かれる。吸収の一貫性はよい、均等性はよい、効率は高い、精密は高く、操作は便利、信頼できる。
2.3. プロセスを注ぎなさい:液体の注入の皿への人工的な置かれた電池は液体の位置の流れから-広がりコード前に- >電池の液体の注入の自動重量を量る液体-センサーの自動検出の液体注入の位置への注入の位置、サーボ モーターへの液体の皿の自動移動注入の液体頭部移動を運転する-自動真空、注入口、立場の吸収(液体の注入の場所)を- >自動的にノートの液体の皿-可能にした自動に重量を量ること(不適当な電池の人工的な再水和作用) -自動削除の後の注入の液体-人工的なパッキング シール。
2.4. 自動液体の注入:2つの液体の注入ポンプ。
2.4.1. 立つこと:圧力と低い真空の間で交互にしなさい。
2.4.2. 自動downforce:電池を注入のノズルから分けるため。
2.4.3. 新しい空ブラケットに置かれるブラケットを取除き液体に満ちた電池ブラケットが進められる11.Theへの項目7の操作の流れを繰り返しなさい;
2.4.4. 再度重量を量りなさい。ベルトBを引っ張った後重さを測り直す場所への電池ブラケット移動は重量を量るセンサーに、コード読者ブラケットのバー コード、およびmanipulatorMove 4電池を、バー コードの読むために重量を量るために、およびデータ コンピュータに重量を量る同時に読む。コンピュータは電池のautomaticallyTheの注入の容積を計算し、注入の容積を修飾される知らせる、NGに即時警報があり、NG電池は自動的に、手動inRemove下水管電池除いた。
2.4.5ブラケットがBの引きベルトの口の左端に達する場合、排出のマニピュレーターは1つグループの次のプロセスの装置に電池を動かす;空ブラケットはマニピュレーター1によってベルトAを引っ張るために運ばれブラケットは左の方法および権利によってbackflowed;引きバンドAの右端にバンドB.を引っ張るために、マニピュレーター2大きい空ブラケットは運ばれる。
2.4.6の真空の時間および立つ時間は状態に従って置くことができる。圧力永続的なか大気地位は選ぶことができる
2.5. 自動重量を量り、引きシステム:自動ブラケットの流れの引っ張り、引き、手動バー コードのスキャン、コンピュータのおよびデータ処理重量を量る、自動電池データベース、NG警報および他の機能重量を量る。![]()
3. 装置の技術的な変数
指定 項目 | ZDAE07C |
| Effience | 1PPM |
| 精密注入の液体 | ±1%中 |
| 割り当てられた立場の時間が | 14minに従って計算される。 |
| 収穫 | 1つの注入の修飾された率は> 99%であり、不適当な電池は手動再充電の解決を使用する。 |
| 液体の注入率 | 0~500mladjustable |
| 力 | 2KW |
| 電子スケールの精密 | 範囲:4Kgの正確さ±0.1g。 |
| シーリング | 液体の注入の場所は密封された州にあり、真空は20minのために維持することができる-95kpaにポンプでくまれる、) |
| 全体寸法 | 4000*1900*1800 |
FAQ
Q1:工場または商事会社であるか。
:私達は工場、私達のR & Dのチームと、生産部、電池の溶接機から、等の設計、デッサン、プロセス、アセンブリ、任務および最終的なパッケージおよび船積みである。
Q2:カスタム化を受け入れるか。
A2:肯定。私達はカスタマイズされた機械を受け入れる。10+year豊富な経験の私達の強いR & Dはカスタム化をすることができる。
Q3:価格についてか。
A3:価格は交渉可能である。それは各電池溶接するか、または分類機械内部構成に従っておよびまたあなたの順序の量変えることができる。
Q4:配達についてか。
A4. 標準的な溶接機は10daysの内で渡すことができる。カスタマイズされた電池アセンブリ機械は40daysの内でまたは交渉可能渡すことができる。













