
2KW電池のパックの一貫作業携帯電話のデジタル電槽の分類機械
1のプロフィール
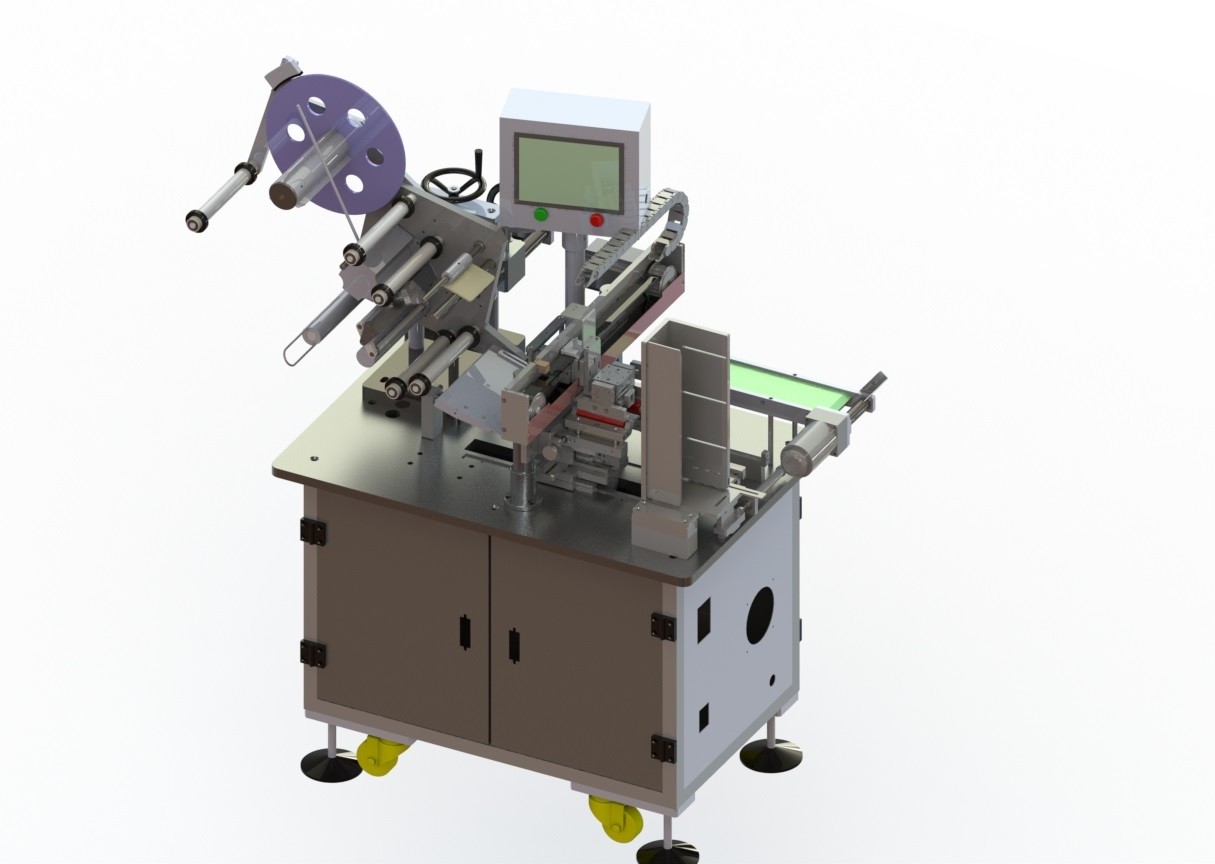
この装置は分類する効果的に不正確な手動分類の位置および低効率の問題を解決できる携帯電話電池の貝のために主に使用されます。
特徴---ラベルは与え、自動にほどき、自動ラベルの除去し、自動ラベル ペーパーの受け取り、手動電池の電池の、自動削除、全体の電池の貝の自動包装置き、マニピュレーターの吸引、そして解放コイルを採用します。
--高性能:10 PCS/分。
3、指定に合わせるため
3.1の適応性がある目的
電池のサイズ
| W (mm) | L (mm) | H (mm) |
| 35-55 | 40-70 | 2-10 |
装置の3.2の技術的な変数
|
指定 項目 |
ZAB01C-00 | |
|
技術的な変数 |
効率(PPM) | 10 |
| 据え付け品の幅の調節可能な範囲 | ±5mm (調節可能か取り替え可能) | |
| 圧縮空気システム | O.4-0.6MPa | |
| 総力(kw) | 2 | |
| 正常な作動力(kw) | 1.7 | |
4の機械指定
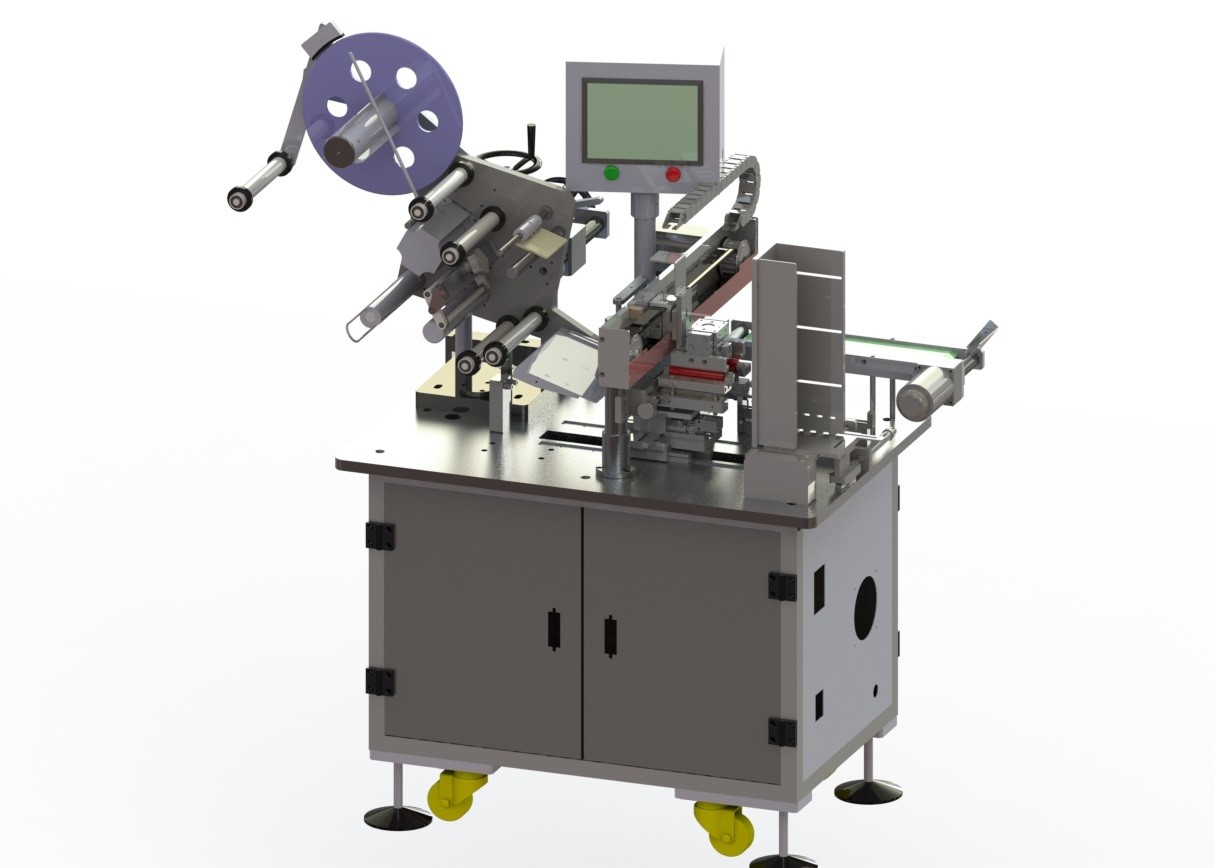
4.1の棚のsystemThe装置はアルミニウム プロフィール フレームを採用します、基質は20mm厚い鋼板をかアルミニウム版採用し、表面は電気版です。
4.2ロール材料への自動ラベルのほどくsystemTheのラベルは、摩擦版張力、ロール材料350mmの最高のサイズを維持するために広がります。
4.3ラベル ペーパー巻き戻すsystemTheの分離のペーパー頭部はスロットに手動で付きます、サーボ モーターは分離のペーパーを先に引っ張るためにドライブ車輪を運転しますセンサーは分離のペーパーをきつく締めるために摩擦車輪はきつく締まるシャフトを運転するが、ラベルおよび停止を検出します。
4.4は、ストリッパーを通して、巻き戻すモーター ドライブの除去のsystemTheのラベルをラベル取除かれます分類します。
![]()
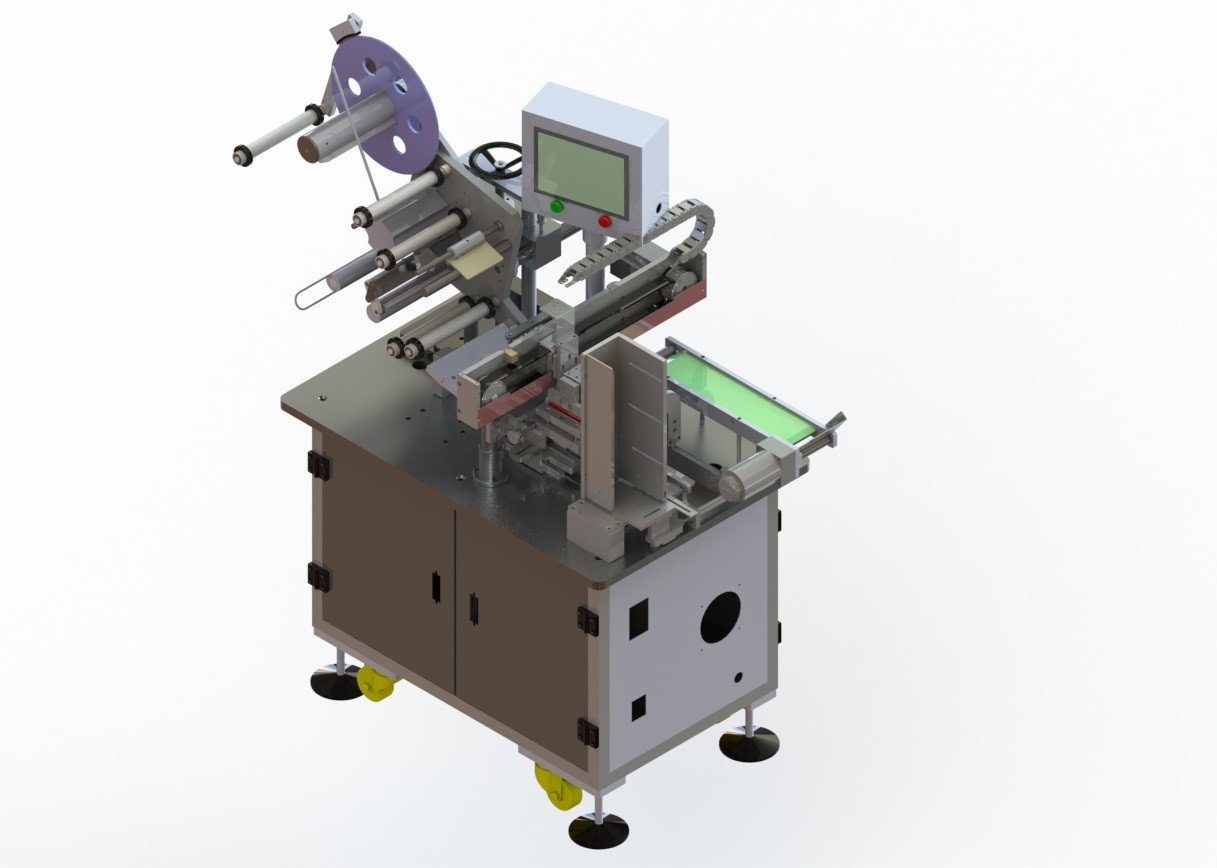
systemManually 4.5バッテリー ポジションの場所はガイド版の電池、電池を次々と先に押し、位置の位置に電池を押します。
4.6分類のsystemTheのマニピュレーターはラベル、分類のメカニズムの上昇の前部にラベルに、分類のメカニズムの上昇の双方置かれた、置かれたよい電池の吸引ラベル添付されますです、ラベルの前部は電池に付し、最終的に上昇の後ろの分類のメカニズムは、ラベルよいです。
4.7のマニピュレーターのsystemTheのマニピュレーターは取りあげるために電池の大きい側面を同時に底の両側で左右にラベルを動かすために付けます。コンベヤー ベルトに貼られた電池を置いて下さい。
4.8作動のsystemTouchスクリーン操作。力、非常停止、マニュアル、自動ボタンついています。
4.9制御panelThe機械は独立した電気板が、漏出スイッチ、dcの安定性の電源および他の電力回路の部品、制御PLC、リレー、運動制御装置、等装備されています。そしてコネクターおよび端末テーブルを使用して外部接続。送電線の天井は部分的に穴があいています。他の装置間のケーブルそして送風管は次ワイヤーで縛られ、配管されます。
![]()
5つのエネルギーmediumPleaseは次のエネルギー媒体を提供します
5.1電源
電圧AC220V± 10% counterphaseの5.1.1即時の変更
5.1.2の頻度50 hz + 1つのhz
5.2空気
5.2.1圧力0.5mpa
5.2.2の5つのlper分の容量
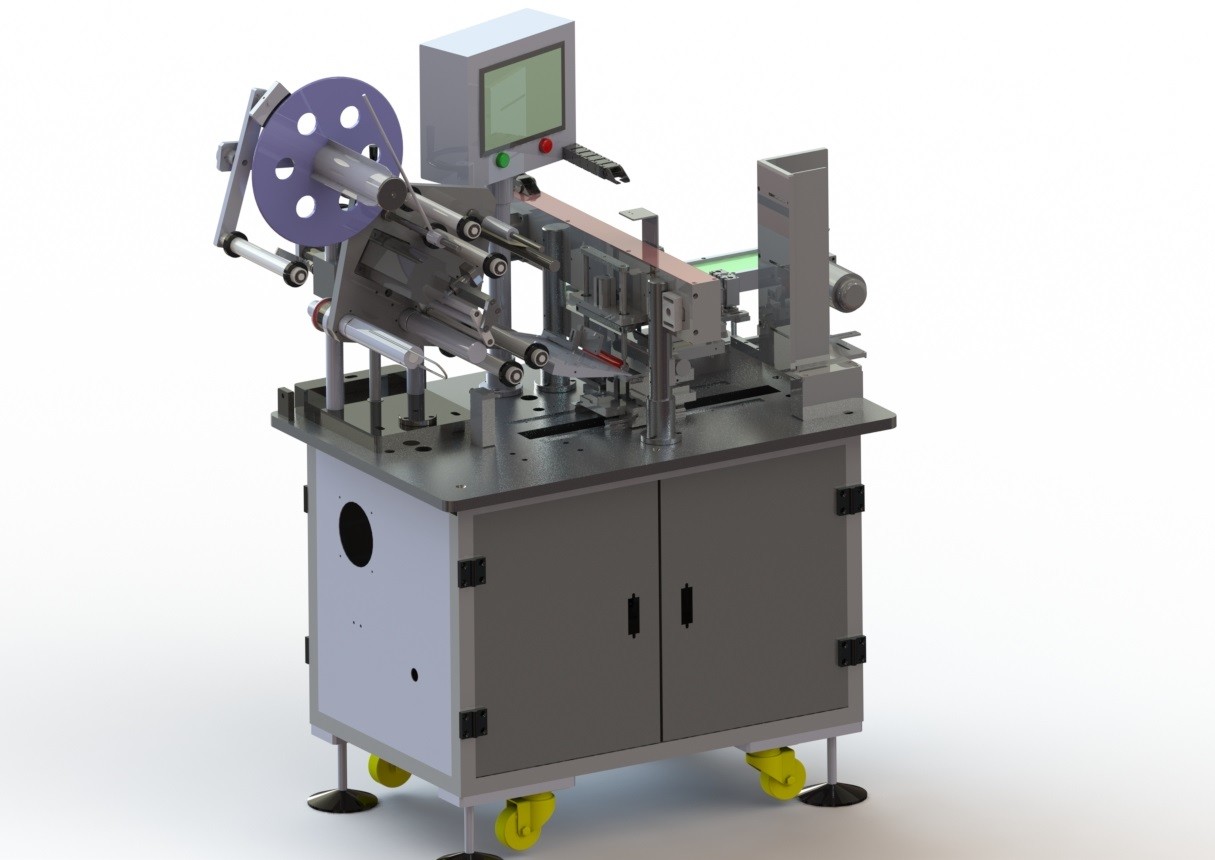
6つは次の環境条件の下で障壁なしで、環境のconditionsThe装置作動できます。
6.1の温度は動的温度5-35℃Storage温度です:0-40℃
6.2. 湿気30-80%しかし凝縮無し。
![]()













